:format(webp):quality(90)/https://www.descopera.ro/wp-content/uploads/2013/10/11475326/3-robot-cover.jpg)
:format(jpeg):quality(80)/https://www.descopera.ro/wp-content/uploads/2013/10/11475326/1-m-blocks.jpg)
:format(jpeg):quality(80)/https://www.descopera.ro/wp-content/uploads/2013/10/11475326/2-virtualbots.jpg)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2026/04/1741781917/a7669165c12fc8434a2ac162f362d4c1-t.jpg)
Chiar ar putea nişte roboţi reali să se construiască/asambleze singuri?
Pare… cam SF şi totuşi, o companie numită iRobot a obţinut recent un brevet de invenţie pentru un aparat care ne apropie de o astfel de epocă.
Aparatul cuprinde un robot cu două braţe cuplat cu o imprimantă 3-D, un dispozitiv de pilit şi altul de găurit, toate montate pe o platformă dotată cu numeroşi senzori, care permit computerului să controleze şi să regleze procesele ce au loc în diferite etape ale fabricării, fie prin adăugarea de material – prin printare 3-D -, fie prin eliminarea de material (prin pilire sau găurire).
Braţele robotice au dispozitive sofisticate de apucare, astfel încât unul poate ţine o piesă abia printată, în timp ce celălalt ataşează de ea o altă piesă, cu adeziv, conectori sau şuruburi – ca un om care-şi foloseşte cu pricepere ambele mâini.
E totuşi nevoie, aici, de un software complex, ceea ce implică intervenţii umane. Dar în ce măsură se pot descurca roboţii fără amestecul oamenilor, ori cu o intervenţie foarte slabă din partea lor?
Pe computer, merge; e chiar tulburător de eficient: nu demult, cercetătorii de la Creative Machines Lab de la Universitatea Cornell, SUA, au demonstrat cum arată evoluţia digitală în cazul unor roboţi virtuali. Aceştia s-au dovedit capabili să se „înmulţească” şi să evolueze, cu o minimă intervenţie din partea oamenilor.
Cercetătorii i-au pus la dispoziţie computerului 4 tipuri de cuburi virtuale, – reprezentând un fel de „ţesuturi” –, unele rigide (ca oasele), altele moi şi capabile de contracţii (ca muşchii), şi l-au lăsat să le asambleze după plac, creând din ele roboţi virtuali capabili să se mişte. Instrucţiunile date computerului au fost foarte sumare, nu i s-au dat niciun fel de indicaţii privitor la felul ar trebui să arate roboţii, ci a fost lăsat să se descurce singur.
Roboţii aveau şi posibilitatea de a se reproduce, fie „sexuat”, făcând schimb de ADN virtual, fie „asexuat”, cu mici schimbări genetice. Cei care se mişcau mai agil, parcurgând distanţele cele mai mari, erau răsplătiţi cu un avantaj evolutiv: aveau mai mulţi „urmaşi”. În rezumat, era un fel de evoluţie, generată în întregime de computer şi care simulează, simplificat, evoluţia lumii vii.
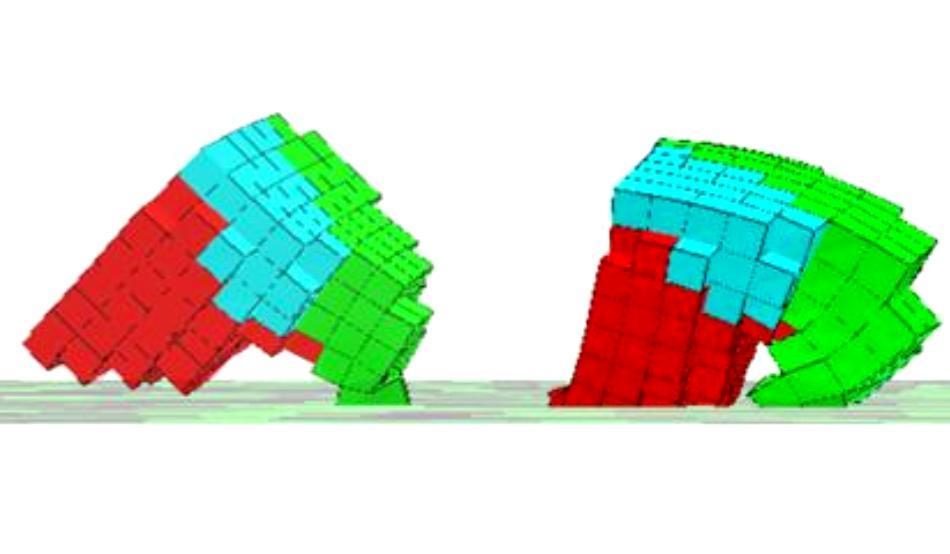
Primii roboţi creaţi erau simpli, puţin mobili, arătând ca nişte cuburi tremurătoare. Dar, în urma „evoluţiei”, a rezultat o diversitate extraordinară de creaturi virtuale, tot mai complexe, tot mai agile, de diferite forme, cu diferite moduri de deplasare, iar varietatea formelor şi a mişcărilor i-a surprins şi pe cercetători, care spun că unii dintre roboţi se mişcă în moduri la care niciun inginer nu s-ar fi gândit. Iată, mai jos, câteva exemple.
Aceşti roboţi sunt în întregime virtuali, dar designul lor ar putea, într-o bună zi, să inspire specialiştii în crearea unor roboţi adevăraţi mai eficienţi şi mai performanţi şi care s-ar putea asambla singuri, generaţie după generaţie, îmbunătăţindu-şi performanţele, specializându-se, adaptându-se la sarcinile pe care le-ar avea de îndeplinit – ca şi fiinţele vii.
Este posibilă în realitate o astfel de evoluţie?
Cea mai recentă reuşită în domeniul roboţilor care se asamblează singuri a fost anunţată în urmă cu câteva zile de un grup de specialişti de la Massachusetts Institute of Technology (MIT), printre care se numără şi un cercetător de origine română, Daniela Rus, un eminent specialist în robotică.
Ei au recurs la cuburi – denumite M-Blocks – pentru a realiza din ele construcţii modulare capabile să se autoasambleze – un pas spre roboţii ce se vor construi singuri ori îşi vor schimba configuraţia după necesităţi. În ciuda faptului că aceste cuburi nu au părţi exterioare în mişcare, ele pot sări, se pot rostogoli, se pot juxtapune şi suprapune singure – pe scurt, se pot lipi şi dezlipi unul de altul formând diferite configuraţii arbitrare.
Uimitoarele creaţii sunt rodul muncii a trei cercetători de la MIT – John Romanishin, Daniela Rus şi Kyle Gilpin şi urmează să fi prezentate în luna noiembrie la IEEE/RSJ International Conference on Intelligent Robots and Systems.

Care este secretul acestor cuburi mobile, ce se mişcă singure, părând animate de o forţă misterioasă? La exterior, nu au componente în mişcare. În interior au însă câte o mică roată de inerţie, ce se poate roti cu viteze de până la 20.000 t rotaţii pe minut; când roata este frânată, momentul său cinetic este transmis cubului. Pe muchiile şi feţele fiecărui cub există magneţi aranjaţi în mod ingenios, care permit cuburilor să se prindă unul de altul. Deşi una dintre caracteristicile acestui proiect este simplitatea ingenioasă a designului, cuburile sunt totuşi construite cu o grijă deosebită, cu o precizie de amănunt fără de care “dansul” lor, a cărui exactitate ne fascinează, n-ar fi posibil. Magneţii sunt adevăratul secret, ei reprezintă partea originală şi remarcabilă a designului acestor roboţi modulari; ei stabilizează configuraţiile şi menţin traseul cuburilor atunci când acestea se desprind momentan unul de altul pentru a se aşeza într-o altă poziţie. Pe fiecare muchie, se găsesc doi magneţi cilindrici; când două cuburi se apropie unul de altul, magneţii se rotesc astfel încât polii nord ai magneţilor de pe un cub se aliniază cu polii sud ai magneţilor de pe celălalt cub, cuburile find astfel atrase unul spre altul. În acest fel, fiecare faţă a unui cub se poate alipi de oricare faţă a oricărui alt cub. Pe feţe se găsesc câte 4 magneţi, iar muchiile au şi ele o formă bine studiată, pentru a stabiliza poziţia cuburilor.
Unul dintre aspectele extraordinare ale acestui proiect este faptul că specialişti au izbutit să obţină diferite moduri de locomoţie: cuburile nu numai că pot sări şi se pot rostogoli individual, dar pot executa şi sarcini mai complexe: grupuri de cuburi se pot mişca împreună, ba chiar pot muta alte cuburi – acţiuni de ce te duc cu gândul mai degrabă la cooperarea dintr-o o colonie de animale sociale decât la nişte piese de metal şi plastic neînsufleţite. Uimitor!
Ce s-ar putea face cu asemenea roboţi modulari capabili de auto-asamblare în diverse configuraţii?
Una dintre speranţele cercetătorilor este aceea de a reuşi să miniaturizeze cuburile, rezultând ansambluri de “microboţi” în stare să îşi schimbe forma sub ochii noştri, precum metalul lichid din Terminator.
Dar şi la mărimea actuală cuburile ar putea sluji unor scopuri practice importante, cred oamenii de ştiinţă. “Armate” de asemenea cuburi mobile ar putea repara temporar poduri sau clădiri în situaţii de urgenţă, ori ar înălţa schele pe care le-ar reconfigura oricând, în funcţie de necesităţi.
Echipa de la MIT lucrează acum la construirea unei mici armate de 100 de cuburi, dintre care fiecare se va putea mişca în orice direcţie, şi proiectează algoritmii pentru ghidarea lor. “Vrem sute de cuburi, împrăştiate la întâmplare pe podea şi care să fie în stare să se identifice unul pe celălalt, să se unească între ele şi să se transforme autonom într-un scaun, într-o scară sau într-un birou, la cerere”, spune John Romanishin.
Ascultându-l, îţi vine să crezi că nu mai e mult – curând vom vedea, ca pe ceva familiar, roboţi meşterind alţi roboţi, după chipul şi asemănarea lor – sau, poate, mai buni, după cum arată experimentul cu roboţi virtuali realizat la Universitatea Cornell – , un scenariu multă vreme rezervat povestirilor science fiction, dar care , iată, tinde să devină realitatea noastră cea de toate zilele.
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2026/04/1589795423/26671171df23c7690774ae47debd3db6-t.png)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2026/04/1589795485/ce6fea5fd6ce9eb2f4b67abe222b9044-t.jpg)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2026/03/1766046989/cf9d5bb9894deeba45a7f70e2bad1201-t.jpg)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2026/04/1766046944/f316d85ef87688d6f86e4d905942267e-t.jpg)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2026/04/1687506106/89b94c00c7e2922b71570b99a202802c-t.jpg)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2026/04/1619101788/32957ded1e9e7b276a6a3b68ed0bf678-t.jpg)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2026/04/1604659743/ecfbfd8f517c60039963bf4dd393a329-t.jpg)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2026/04/1741781930/ae9b8ad0788f05188eb1d29d2f6d9f03-t.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/04/virus-din-fructele-de-mare_shutterstock_Descopera-10-1024x512.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/02/Ciocolata-are-de-suferit_shutterstock_descopera-9-1024x678.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/04/cea-mai-pura-stea-din-Univers_shutterstock_descopera-10-1024x611.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/04/ochiul-focalizeaza_shutterstock_descopera-5-1024x683.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/04/originii-inelelor-lui-Saturn_ESAWebb_descopera-1024x576.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/03/anomalie-din-mantaua-lui-Marte_shutterstock_descopera-7-1024x769.jpg)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2026/04/1589795438/a7e749bcd84b64b6ec2e5377c1609e60-t.jpg)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2024/01/1623146229/eee2fda331856b8548658339f0001221-t.jpg)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2023/11/1589795452/715050791c680c518054354f939709bf-t.jpg)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2026/04/1593777592/9701ddbd80099d12d61bd4047df1113c-t.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/03/Inteligenta-Artificiala-ar-putea-distruge-anonimitatea_shutterstock_descopera-1024x576.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/04/primul-rege-carol-wiki_Descopera-1024x553.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/04/telefon-smartphone-shutter_Descopera-1024x683.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/04/joburile-viitorului-shutter_Descopera-1024x643.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/04/alcool-pericol-shutter_Descopera-1024x683.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/04/Efectul-noului-inceput-shutter_Descopera-1024x683.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/04/accident-industrial-sclipici-shutter_descopera-1024x683.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/04/Efectele-schimbarilor-climatice_shutterstock_descopera-10-1024x634.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/04/antarctica-mistere-shutter_Descopera-2-1024x683.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/04/virus-din-fructele-de-mare_shutterstock_Descopera-10-1024x512.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/02/Ciocolata-are-de-suferit_shutterstock_descopera-9-1024x678.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/04/gandul-1024x576.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/04/aristocratii-purtau-peruci-shutter_Descopera-1-1024x683.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/04/cea-mai-pura-stea-din-Univers_shutterstock_descopera-10-1024x611.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/04/tulburare-neurologica-shutter_Descopera-1024x576.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/04/angajati-stresati-shutter_Descopera-1024x680.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/03/Inteligenta-Artificiala-ar-putea-distruge-anonimitatea_shutterstock_descopera-10-1024x515.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/04/fonograf-inventie-wiki_Descopera-1024x859.jpg)