:format(webp):quality(90)/https://www.descopera.ro/wp-content/uploads/2010/11/7700635/1-cover-marte.jpg)
:format(jpeg):quality(80)/https://www.descopera.ro/wp-content/uploads/2010/11/7700635/2-cover-marte-mic.jpg)
:format(jpeg):quality(80)/https://www.descopera.ro/wp-content/uploads/2010/11/7700635/3-01-lunokhod.jpg)
:format(jpeg):quality(80)/https://www.descopera.ro/wp-content/uploads/2010/11/7700635/4-02-lunokhod-2.jpg)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2026/01/1741781917/ba76311a361b08891e83225e89592fcf-t.jpg)
Rover-ul – cel mai versatil vehicul spatial
Acesti roboti mobili si robusti, adaptati oricarui tip de teren, contribuie considerabil la deschiderea unor noi orizonturi de cunoastere a altor lumi. Probabil ca, in cele din urma, oamenii vor explora ei insisi planetele solide ale Sistemului nostru solar sau pe cele ale sistemelor vecine in Calea Lactee, dar pana atunci roverele ne ajuta sa invatam lucruri importante despre suprafetele si mediul altor planete sau corpuri ceresti.
Propriu-zis, un rover este un vehicul de explorare spatiala, proiectat special pentru deplasarea pe o suprafata extraterestra. Unele rovere sunt construite sa transporte chiar astronauti, in vreme ce altele sunt roboti partial sau 100% autonomi. De obicei, roverele ajung pe suprafetele planetare cu ajutorul unei aeronave de tip „lander”, care le coboara din nava principala, ramasa pe orbita.
Desigur, dispozitivele stationare, fixe, care sunt trimise pe corpuri spatiale straine au o capacitate sporita de analiza si observare la fata locului, fiind mai mari si putand suporta echipamente multiple. Totusi, roverele prezinta cateva avantaje in detrimentul aparatelor imobile: ele pot examina o suprafata mai mare, pot fi focusate spre cercetarea unor aspecte interesante ale mediului si pozitionate in locuri insorite, pentru inlesnirea realimentarii fotovoltaice. Iar avantajul pe care il prezinta in fata navelor orbitale este acela ca roverele pot observa terenul la nivel microscopic si chiar derula experimente propriu-zise, recoltand mostre de la fata locului. Dezavantajele sunt reprezentate de expunerea mare la situatii de risc.
Roverele sunt folosite in conditii distincte fata de cele de pe Terra, ceea ce impune inzestrarea lor cu echipamente speciale. Dispozitivele trebuie sa reziste la accelerari mari si bruste, la conditii termice extreme, la presiune, praf, coroziune si raze cosmice, dar si sa ramana functionale fara reparatii pe o perioada determinata de timp.
Roverele care ajung pe corpuri ceresti aflate la mari distante de Pamant, asa cum este cazul vehiculelor de explorare ale lui Marte, nu pot fi telecomandate in timp real, deoarece viteza undelor radio este prea mica pentru a permite comunicatiile directe intre emitatorul aflat pe Terra si receptorul aflat la zeci de milioane de kilometri distanta. Prin urmare, roverele sunt capabile sa opereze autonom, cu asistenta limitata de la turnul de control terestru, in ceea ce priveste navigatia si acumularea de date. Totusi, aparatele necesita implicare umana pentru identificarea obiectivelor cu potential stiintific, coordonarea pe distante mai mari si determinarea pozitionarii roverului pentru a maximiza captarea de energie solara, in caz ca depinde de aceasta pentru alimentare.
Pe Luna: primul om – american, prima masina – sovietica
Pana acum, agentiile spatiale au reusit sa trimita rovere pe numai doua corpuri cosmice din Sistemul Solar: pe Luna si pe Marte. Si nici aceasta sarcina nu a fost una foarte usoara. Cum poate era si firesc, primele vehicule de explorare a altor corpuri ceresti au fost trimise pe Luna. Inceputul a fost timid si ratat, roverul sovietic programat sa fie primul robot telecomandat de pe suprafata Selenei fiind distrus cu ocazia esuarii lansarii din 19 februarie 1969.
Uniunea Sovietica nu a fost descurajata de esec si a incercat o noua abordare, la inceputul anilor ’70, atunci cand a reusit sa trimita, la distanta de trei ani, unul dupa celalalt, doua vehicule robotice pe satelitul natural al Terrei. Roverele sovietice au fost denumite Lunokhod 1 si 2 si aveau urmatoarele dimensiuni: 135 cm inaltime, 170 cm lungime si 160 cm latime, cantarind cate 840 de kilograme pe Pamant, dar numai 140 de kilograme pe Luna.
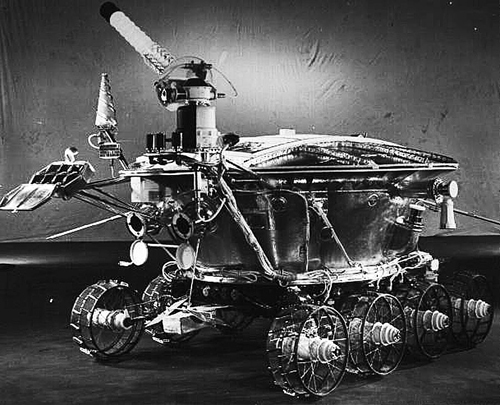
Lunokhod 1 se deplasa cu doua viteze – 1 km/h si 2 km/h -, fiind dotat cu opt roti si cu trei camere de filmat. Aparatul avea baterii care ii ofereau energie, dar si panouri solare, ce erau expuse pe timpul zilei lunare, pentru a realimenta acumulatorii. De asemenea, roverul mai dispunea si de o sursa de incalzire radioactiva, pentru a nu ingheta pe timpul noptii lunare.
O echipa formata din cinci coordonatori a trimis continuu comenzile de deplasare spre Lunokhod 1. Roverul a transportat instrumente stiintifice care au masurat diverse proprietati ale solului selenar, nivelurile de radiatie luminoasa si ultravioleta, precum si campurile magnetice. Lunokhod 1 a fost parte a misiunii rusesti Luna 17, aselenizand pe 17 noiembrie 1970, cu aproximativ un an si jumatate dupa ce Neil Armstrong a devenit primul om care a pus piciorul pe satelitul natural al Pamantului.
Vehiculul ar fi trebuit sa reziste trei luni, dar a operat timp de 11. In acest interval, a parcurs aproximativ 10,5 kilometri, a transmis inapoi, pe Pamant, peste 20.000 de imagini si a executat 500 de teste asupra solului lunar. De asemenea, a fost primul robot telecomandat trimis vreodata pe un corp astronomic si a detinut recordul pentru durabilitate intre roverele spatiale timp de peste 30 de ani, pana cand a fost detronat de catre Roverele de Explorare Martiana.
“Autoturismele” NASA
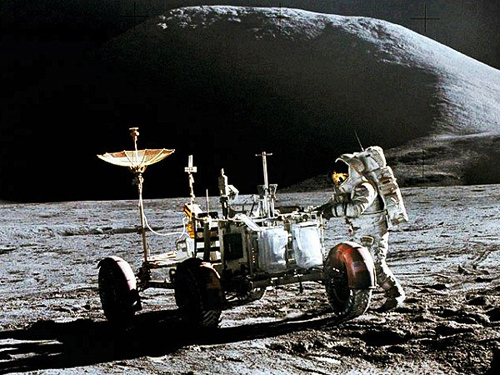
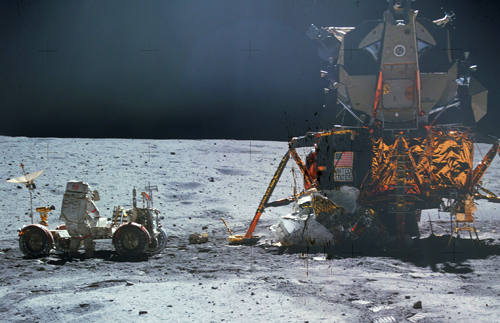
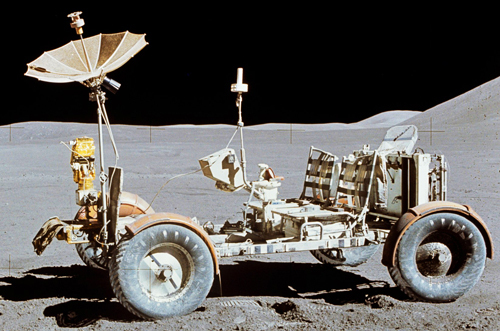
In urmatorii doi ani de la succesul Lunokhod, americanii de la NASA nu s-au lasat mai prejos, lansand LRV-urile (Lunar Roving Vehicle), vehicule electrice cu patru roti, alimentate de baterii si folosite pe suprafata Lunii in cadrul Misiunilor Apollo 15, 16 si 17, din 1971 si 1972. Aceste rovere nu erau robotei telecomandati de la sol, ci masini lunare in toata regula, ce putea transporta unul sau doi astronauti, echipamentul acestora si diverse mostre.
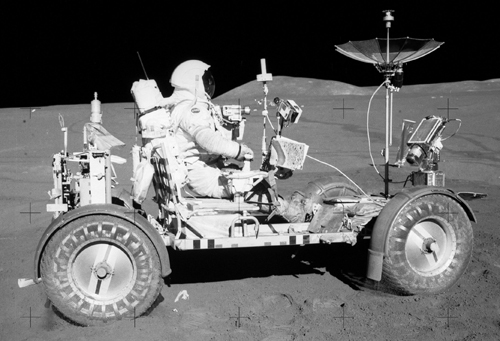
LRV-urile s-au deplasat, in total, pe distante de 28, 27, respectiv 36 de kilometri, functionand, in medie, cate trei ore si jumatate. Un LRV cantarea 210 kilograme si putea transporta o incarcatura aditionala de 490 kilograme pe suprafata Lunii. Lungimea vehiculului era de trei metri, cu o latime de 2,3 metri si o inaltime de 1,1 metri. Complet incarcat, un LRV isi pastra o garda de 35 de centimetri fata de sol.
Rotile, cu diametrul de 81 de centimetri, aveau jante construite dintr-un aliaj de aluminiu, imbracate in cauciucuri cu talonul de 23 de centimetri, din zinc armat cu fire de otel. Fiecare roata avea miscare independenta si era pusa in miscare de un motor electric capabil sa desfasoare o forta de 0,25 cai-putere, la 10.000 de rotatii pe minut. Puterea LRV-urilor era asigurata de baterii neincarcabile din hidroxid de potasiu cu zinc-argint, avand capacitatea de 121 de Amperi si asigurand o autonomie de aproximativ 92 de kilometri.
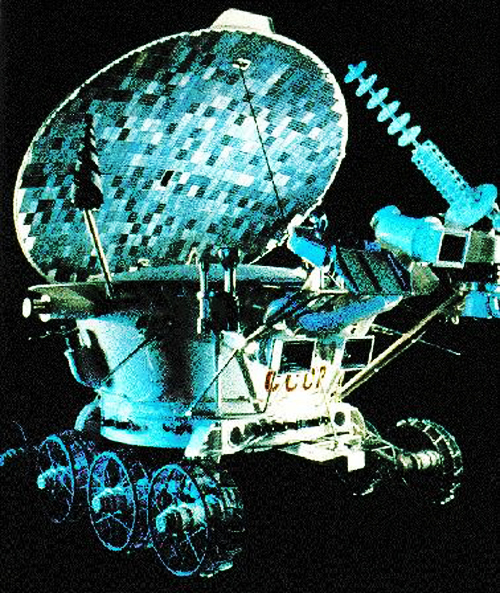
Sovieticii au facut o noua miscare la inceputul lui 1973, cand, pe 16 ianuarie, a aselenizat Lunokhod 2, al doilea robot trimis vreodata pe un corp celest. Dispozitivul a operat vreme de patru luni, a acoperit o distanta de 37 de kilometri de teren si a trimis pe Pamant 86 de imagini panoramice si 80.000 de fotografii. De atunci si pana astazi, acestea au ramas singurele vehicule care au vazut de aproape suprafata Lunii. Tot rusii au mai facut o ultima incercare, in 1977, construind Lunokhod 3, pe care aveau de gand sa il trimita pe satelit, insa misiunea spatiala a fost anulata din pricina lipsei de fonduri care a dus la imposibilitatea lansarii.
Deschizatorul de drumuri pe Marte
Si s-a lasat linistea. O liniste, insa, care nu avea sa insemne decat ca specialistii se pregateau pentru a face un pas si mai mare. Proiectul explorarii Lunii a fost abandonat nu din imposibilitatea de a o revizita, ci pentru abordarea unor mize mai mari. Desi agentiile spatiale ar fi putut lua in calcul planeta Venus, intrucat aceasta se afla la o distanta de „numai” 38 de milioane de kilometri departare de Terra, comparativ cu cele 57 de milioane de km care ne despart de Marte, oamenii de stiinta au fost mult mai intrigati de Planeta Rosie, suspectata, in urma observarilor telescopice, ca ar semana cu Pamantul in unele privinte, ca ar putea gazdui apa si chiar ca ar fi favorizat, candva, aparitia si evolutia vietii.
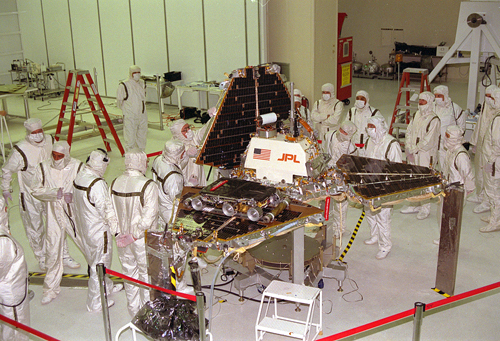
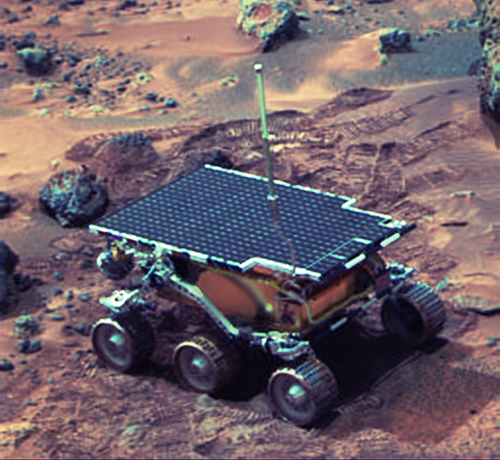
Sonda Mars Pathfinder, denumita mai tarziu si „Statia Memoriala Carl Sagan”, a fost lansata pe 4 decembrie 1996, de catre NASA, la bordul navei spatiale Delta II. Dupa un voiaj de sapte luni, sonda a amartizat in Ares Vallis, din regiunea martiana Chryse Planitia, la 4 iulie 1997. Lander-ul s-a deschis, eliberand pe solul martian roverul intitulat Sojourner, primul vehicul terestru care a ajuns cu succes pe o alta planeta. Misiuni anterioare similare, cum ar fi cea americana Marte 3 si proiectul sovietic Marte 4NM, nu au atins niciodata Planeta Rosie. Inainte ca Sojourner sa fie trimis pe Marte, americanii au testat pe Pamant, intr-un teren stancos, de tipul celui intalnit pe Marte si aflat in Deserul Mojave din California, un robot similar, FIDO, tehnologia acestuia echipand apoi roverul Sojourner.
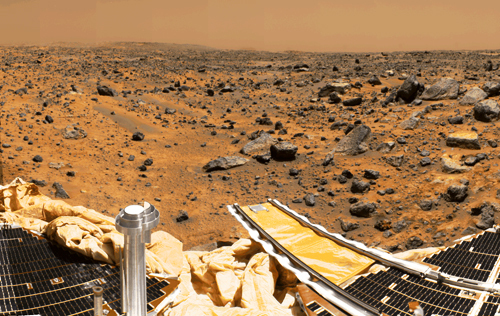
Pathfinder a furnizat 16.500 de imagini captate cu ajutorul sondei fixe si 550 de fotografii realizate de Sojourner, obtinand totodata si date din peste 15 analize chimice de roci si sol, vanturi si alti factori meteo.
Roverul martian cu sase roti avea o inaltime de numai 28 de centimetri, o lungime de 63 de centimetri si o latime de 48. Micutul vehicul, denumit de NASA „micro-rover”, putea atinge viteza maxima de 0,4 metri/minut, la o masa de 11,5 kilograme, care se echivaleaza cu o greutate de numai 4,5 kilomgrame pe Marte. Roverul a transportat instrumente specifice de masurare a proprietatilor solului martian, dar si pentru analiza chimica a rocilor planetei rosii. Sojourner „vedea” prin trei mici camere, iar un panou solar montat deasupra sa ii asigura electricitatea necesara functionarii.
Roverul a explorat exclusiv zona de pe raza sondei Mars Pathfinder, nedepartandu-se niciodata mai mai mult de cativa metri de locul de amartizare si parcurgand, in total, doar putin peste o suta de metri intr-un interval ceva mai mare de 80 de zile in care a operat pe suprafata martiana. Ultimul contact cu Pathfinder a avut loc pe 27 septembrie 1997.

Pe Planeta Rosie am dat dovada de… spiritualitate si oportunism!
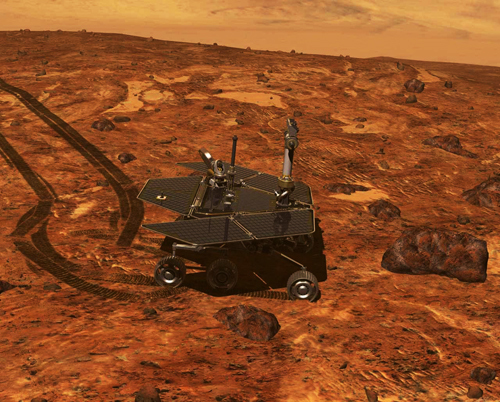
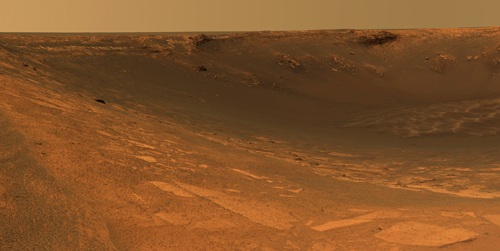
Misiunea Mars Pathfinder a fost doar varful iceberg-ului in ceea ce priveste „cucerirea” lui Marte. Succesoarea acestei misiuni, Mars Exploration Rover, a fost demarata de NASA in anul 2003, prin trimiterea a doua rachete spatiale care au transportat cele mai cunoscute doua vehicule de teren de tip rover – Spirit si Opportunity. Spirit a decolat de pe Terra la bordul unei rachete Delta II, pe 10 iunie 2003, si a amartizat cu bine, in dimineata zilei de 4 ianuarie 2004. Celalalt Rover – Opportunity – a pornit pe 7 iulie 2003 si a ajuns pe Marte la 24 ianuarie 2004. Misiunea a fost un mare succes din toate punctele de vedere. Cele doua rovere gemene, in afara de recoltarea probelor geologice, au mai avut sarcina de a depista, cu ajutorul instrumentelor din dotare, prezenta apei si a aventualei vieti pe planeta Marte. Si au supravietuit ani intregi mai mult decat au fost proiectate.
Lansarea roverului Spirit
Fiecare vehicul a fost dotat cu baterii fotovoltaice si cu instrumente de masura utilizate in analizarea si fotografierea esantioanelor de roci. Spirit si Opportunity au fost investite cu un program inteligent, de natura sa analizeze mediul inconjurator si sa comande ocolirea obstacolelor din teren. Pentru prima oara, prin cercetarea rocilor sedimentare de catre cele 2 rovere, s-a constatat existenta prealabila a apei pe o alta planeta, pe Marte.
Atat Spirit cat si Opportunity au, fiecare, o masa de 170 de kilograme, care „devine” o greutate de 63 de kilograme pe Marte. Dimensiunile roverelor gemene sunt de 1,5 metri lungime si doi metri latime; dimpreuna cu aparatul de fotografiat montat deasupra, ele masoara 1,5 metri in inaltime. Roverele de Explorare Martiana se deplaseaza pe sase roti si sunt prevazute, in portiunea frontala, cu un brat care transporta diferite instrumente si camere video performante, dar de mici dimensiuni.
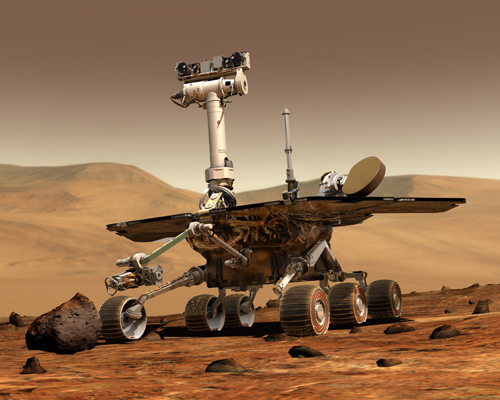
Viteza maxima de deplasare a dispozitivelor este de 5 centimetri pe secunda, ele fiind programate sa se miste timp de 10 secunde, sa stationeze vreme de 20 de secunde pentru a „intelege” terenul, inainte de a avansa, in siguranta, pret de alte 10 secunde. Prin urmare, viteza efectiva de deplasare a lui Spirit si a lui Oppotunity este de numai 1 cm/s.
Cele doua rovere au fost destinate, initial, unei misiuni de numai 90 de zile. Totusi, de vreme ce au continuat sa functioneze dincolo de acest termen, au mai primit, ficare, cate inca cinci misiuni. In iulie 2007, in timpul celei de-a patra misiuni, o puternica furtuna de praf martiana a blocat captarea luminii solare de catre panourile fotovoltaice montate pe Spirit si Opportunity, fenomen care a amenintat intregul program. Totusi, furtuna s-a risipit, iar roverele si-au putut relua mai departe activitatile.
Pe 1 mai 2009, dupa ce a parcurs distanta totala de 7,73 kilometri pe terenul martian, Spirit s-a blocat intr-un sol nisipos. Dupa aproape noua luni de eforturi menite a-l repune pe drum, NASA a anuntat, la 26 ianuarie 2010, ca scopul roverului – inca operational, dar imobil – este reconsiderat, acesta devenind platforma stiintifica stationala.
Acest lucru avea sa ii permita lui Spirit sa ii asiste pe cercetatori in moduri inaccesibile unei platforme mobile, cum ar fi detectarea „oscilatiilor” in miscarea de rotatie a planetei, caz care ar indica un miez lichid. Din pacate, orice forma de comunicare cu roverul a incetat in ziua 2210 a misiunii, pe 22 martie 2010. NASA spera totusi sa mai poata folosi cumva masinaria.
In ceea ce-l priveste pe Opportunity, acesta este inca functional 100% si se apropie de punctul in care va parcurge 24 de kilometri pe Marte, roverul comunicand in continuare cu turnul de control de pe Pamant. Momentan, Spirit stationeaza, deoarece datele acumulate sunt pe masura sa ii umple memoria disponibila. Ocazional, aceste date trebuie downlodate pe Terra, proces care limiteaza deplasarea vehiculului sau alte activitati. Procesul a fost intarziat din pricina unei defectiuni temporare a antenei Deep Space Network, care a prevenit transferul de date.
Intregul program Mars Exploration Rover prezentat intr-un clip animat de numai 9 minute
*
Viitorul: inapoi pe Luna si pe Marte!
Nici sarace, dar nici apoteotice – cam acestea ne sunt realizarile, in ceea ce priveste vehiculele pe care le-am trimis pe alte lumi. In ceea ce priveste viitorul, acesta nu suna deloc rau:
• Agentia Spatiala Europeana, ESA, lucreaza in acest moment la proiectarea, construirea si testarea prototipului de rover ExoMars, programat sa fie lansat spre Marte in anul 2018.

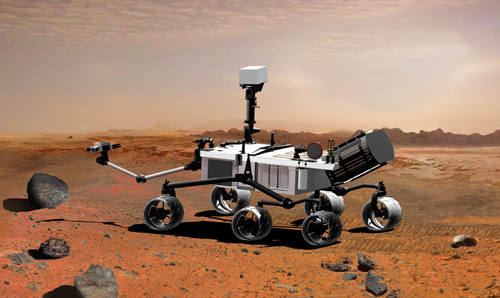
• Laboratorul Stiintific Martian este un vehicul NASA care va fi lansat in toamna lui 2011. Roverul va fi de peste cinci ori mai greu si va putea cara de peste zece ori mai multe instrumente stiintifice decat oricare dintre Roverele de Explorare Martiana de pana acum.
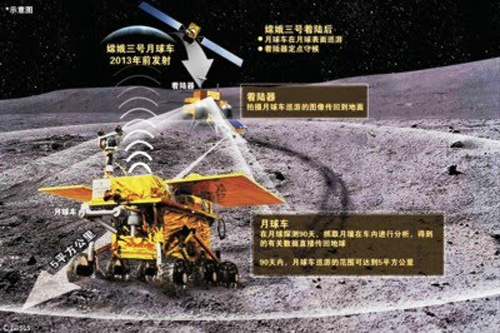
• Chang’e 3 este un rover chinez, lunar de aceasta data, care va fi lansat in 2013. Va reprezenta primul vehicul lunar al Chinei, parte a celei de-a doua faze a Programului Chinez de Explorare a Lunii, intreprins de Administratia Spatiala Nationala Chineza.
• Misiunea Chandrayaan-II este un parteneriat stiintific intre India si Rusia, constand intr-o statie orbitala lunara si o statie de aselenizare. Rover-ul acestei misiuni, proiectat de studentii rusi, cantareste 50 de kilograme, are sase roti si va functiona cu baterii solare. Va aseleniza in apropierea unuia dintre polii Selenei si va opera timp de un an, acoperind o distanta totala de 150 km, la viteza maxima de 360 metri/ora.
Trebuie mentionat ca nici NASA nu renunta la Luna. Agentia spatiala americana are de gand sa trimita pe satelitul natural al Pamantului vehicule cu o autonomie mult sporita comparativ cu cea a roverelor din misiunile Apollo. Nu este de neglijat nici competitia spatiala Google Lunar X Prize, deja cunoscuta la nivel international.
Scopul final al concursului Google Lunar X Prize este oferirea unei imense posibilitati inventatorilor din toata lumea de a-si trimite pe Luna propriile vehicule de explorare. Gigantul Google a anuntat, inca din septembrie 2007, cursa pentru aselenizare. De atunci si pana astazi, 22 de echipe din toata lumea au lucrat neobosit la diverse prototipuri.

Pe 3 octombrie 2010, in Marea Britanie, a avut loc intalnirea acestora cu organizatorii evenimentului, pentru a regla ultimele detalii ale misiunilor. Un premiu de peste 20 de milioane de dolari va fi acordat acelei echipe care ajunge prima pe Luna si va parcurge cu roverul mai mult de 500 de metri pe suprafata satelitului natural al Terrei. In plus, alte 4 milioane de dolari le revin tuturor celor ale caror aeronave „supravietuiesc” aselenizarii. Daca nimeni dintre cei inscrisi in concurs nu reuseste sa trimita un vehicul pe Luna pana in decembrie 2012, atunci premiul in bani va scadea la 15 milioane de dolari. Daca peste inca doi ani nu se reuseste aselenizarea, competitia va fi intrerupta.
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/11/inteligenta-artificiala-shutter_Descopera-1024x572.jpg)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2026/01/1589795485/0cf55bb8e4c3725375453c825897e976-t.jpg)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2026/01/1589795423/6992e3e2f0ac282c824e522d778ae95f-t.jpg)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2026/01/1766046989/ef8c1bbc99a8e4466e08df2b75e34ccd-t.jpg)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2026/01/1766046944/403a27b6df577d717e85fe17aaec37e1-t.jpg)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2026/01/1766046953/172adf1f0e935f3521961ea66d2e5595-t.jpg)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2026/01/1687506106/73b0fbd4dbd81ab83c23f8dbcc008316-t.jpg)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2026/01/1619101788/5b76dd4ab75198804c67c184f57b0b6d-t.jpg)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2026/01/1604659743/6a886dda98f33d47e28500870fa77f32-t.jpg)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2026/01/1741781930/fc7baf1acfeb7d815374467379a9055f-t.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/01/vom-putea-vedea-o-supernova_JWST-Venus_descopera-1024x787.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/01/chirurgia-plastica-shutter_descopera-1024x683.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/01/teoriile-conspiratiei-shutter_Descopera-3-1024x585.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/01/in-jurul-lumii-shutter_Descopera-1024x551.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/08/fizice-care-te-ajuta-sa-dormi_shutterstock_descopera-10-1024x576.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/01/dormitul-weekend-shutter_Descopera-1024x659.jpg)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2026/01/1589795438/20f87cc67e0296bb3136fe0c2a42e61f-t.png)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2024/01/1623146229/eee2fda331856b8548658339f0001221-t.jpg)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2023/11/1589795452/715050791c680c518054354f939709bf-t.jpg)
:format(wepb):quality(80)/https://www.descopera.ro/wp-content/uploads/sfm/2026/01/1593777592/fdcd82e872b972dfa82f80a00979e4f3-t.png)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/01/diferenta-dintre-Panteon-si-Partenon_Partenon_Steve-Swayne_wiki_cc-by-20_Descopera-1024x719.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/01/vom-putea-vedea-o-supernova_JWST-Venus_descopera-1024x787.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/11/Vladimir-Putin-shutter_Descopera-1024x575.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/01/vise-anulate-shutter_Descopera-1024x683.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/01/cel-mai-vechi-rau-wiki_Descopera-1024x768.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/11/primele-stele-ale-Universului_shutterstock_Descopera-8-1024x441.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/01/oameni-somaj-shutter_Descopera-1024x684.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/01/informare-meteorologica-shutter_Descopera-1024x683.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/01/arta-rupestra-pesteri-shutter_descopera-1024x643.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/01/chirurgia-plastica-shutter_descopera-1024x683.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/01/teoriile-conspiratiei-shutter_Descopera-3-1024x585.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/01/temperaturile-umiditate-shutter_descopera-1024x683.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/01/interzisi-cainii-in-Antarctica_Mitchell-Library_State-Library-of-New-South-Wales_descopera-1024x762.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/01/in-jurul-lumii-shutter_Descopera-1024x551.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/08/fizice-care-te-ajuta-sa-dormi_shutterstock_descopera-10-1024x576.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2025/08/social-media-Internet-shutter_descopera-1024x555.jpg)
:format(webp):quality(80)/https://www.descopera.ro/wp-content/uploads/2026/01/Instagram-hackeri-shutter_Descopera-1024x768.jpg)